Learning Long-Horizon Action Dependencies in Sampling-Based Bilevel Planning
Conference on Robot Learning (CoRL), 2024
PDF
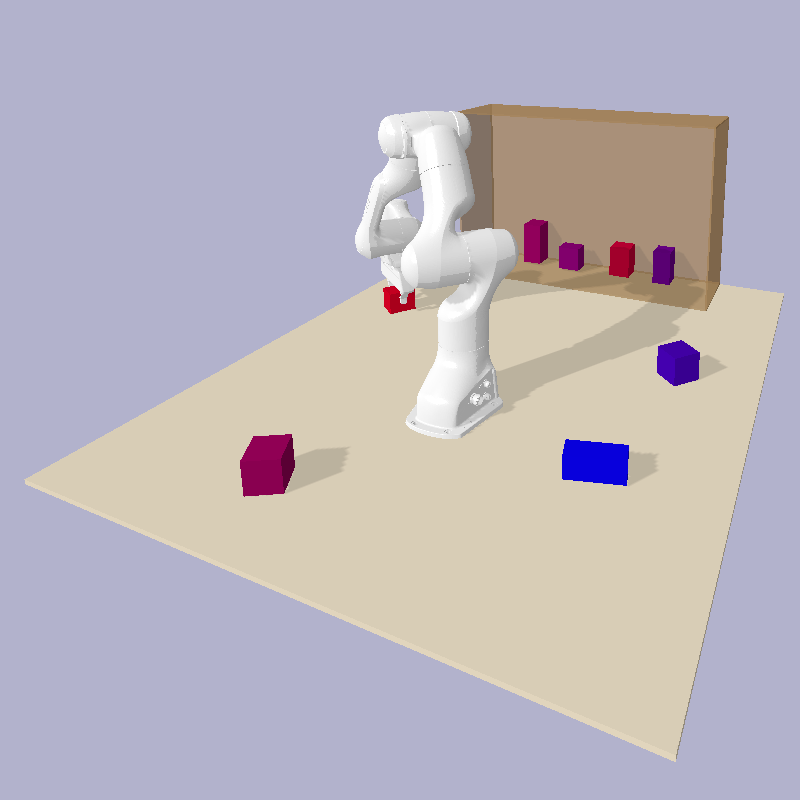
Abstract: Autonomous robots will need the ability to make task and motion plans that involve long sequences of actions, e.g. to prepare a meal. One challenge is that the feasibility of actions late in the plan may depend on much earlier actions. This issue is exacerbated if these dependencies exist at a purely geometric level, making them difficult to express for a task planner. Backtracking is a common technique to resolve such geometric dependencies, but its time complexity limits its applicability to short-horizon dependencies. We propose an approach to account for these dependencies by learning a search heuristic for task and motion planning. We evaluate our approach on five quasi-static simulated domains and show a substantial improvement in success rate over the baselines.
Recommended citation:
@inproceedings{cieslar2024learning,
author = {Cieslar, Bartlomiej and Kaelbling, Leslie Pack and Lozano-Perez, Tomas and Mendez-Mendez, Jorge},
booktitle = {Proceedings of the 8th Conference on Robot Learning (CoRL-24)},
title = {Learning Long-Horizon Action Dependencies in Sampling-Based Bilevel Planning},
year = {2024},
}